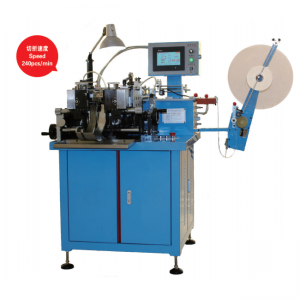

မြန်နှုန်းမြင့် Rotary Press
မြင့်သည်။SpeedRotary Press (Sဟက်ကင်းသောPနောက်ကျFတီးခြင်း)
ပင်မနည်းပညာဒေတာ
စက်ဦးတည်ချက် ဘယ်မှညာသို့
ပုံနှိပ်အရောင် 6-10 COLORS
မက်တယ်။ဝဘ်အကျယ် 1000 မီလီမီတာ
မက်တယ်။စက်အမြန်နှုန်း 150 m/min (¢150mm plate cylinder)
မက်တယ်။ပုံနှိပ်အမြန်နှုန်း 130 m/min (¢130mm plate cylinder)
မှတ်ပုံတင်ခြင်း တိကျမှု ±0.1㎜ (အလိုအလျောက်ချိန်ညှိစနစ်)
ရစ်လုံး ဒိုင်ယာ ¢650㎜ကို ဖြေလျှော့ပါ။
ရစ်ပတ်ဒိုင်ယာ ¢650㎜ ပြန်ရစ်ပါ။
တင်းအားအကွာအဝေး 3-30㎏ (အပြည့်အဝဝန်)
တင်းမာမှုတိကျမှု ±0.3㎏ (အနံတိကျမှု)
Paper Core Dia¢76㎜×¢92㎜
လေအရင်းအမြစ် 0.6 MPa
ဆရာဝန်အက ±5㎜
လျှပ်စစ်အခြောက်ခံခြင်း။
ပင်မမော်တာပါဝါ 11.0 KW
စုစုပေါင်းစက်ပါဝါ 100.00 KW
စုစုပေါင်းအတိုင်းအတာ 14950㎜×2600㎜×2700㎜
စက်အလေးချိန် 11000 KGS
အလွှာ
PVDC 35~60um
PET 12~60um
OPP 20~60um
BOPP 20~60um
PE 30~100um
NY 12 ~ 50um
CPP 20~60um
ပေါင်းစပ်ရုပ်ရှင် 15 ~ 60um
ဇာတ်ဝိသေသ
************************************************** ******************
Unwind ယူနစ်
ဖွဲ့စည်းပုံ
1. Built-in dual-position rotary turret
2. နှစ်ထပ်ရှပ်များသည် ရစ်လုံးများကို လွတ်လပ်စွာ တက်ကြွစွာ ဖြေလျှော့ပါ။
3. YASKAWA vector controller ကို လွတ်လပ်သော ဂီယာစနစ်တွင် အသုံးပြုသည်။
4. DANCER- Tension detector စနစ်နှင့် DANCER အဆက်မပြတ်တင်းမာမှုစနစ်
5. Close-loop တင်းအားထိန်းချုပ်မှု
6. အလုပ်သမားအား ရစ်လုံးပြောင်းရန် သတိပေးသည့် အချက်ပေးစနစ်ပါရှိသော အလိုအလျောက်ပြောင်းသည့် ရီပတ်
သတ်မှတ်ချက်
1. Max.စက္ကူအူတိုင် အကျယ် ၉၄ မီလီမီတာ
2. Max.ရစ်လုံးအား ဖြေလျှော့ရန် ¢600 မီလီမီတာ
3. မော်တာ AC4KW+ENCODER+FAN (4KW vector controller နှင့်အတူ AC4KW၊YASKAWA)
l Rotary turret အမြန်နှုန်း 1 r/min
l တင်းမာမှုအကွာအဝေး 3 မှ 30 ကီလိုဂရမ်
l တင်းမာမှုတိကျမှု ± 0.3 ကီလိုဂရမ်
အင်္ဂါရပ်များ
1. မြင့်မားသော စွမ်းဆောင်ရည်ဖြင့် မရပ်မနား ပြောင်းလဲနေသော ရီးလ်သည် သင့်အချိန်ကို သက်သာစေမည်ဖြစ်သည်။
2. Synchroreel ပြောင်းလဲခြင်း၊ အဆက်မပြတ်တင်းမာခြင်း၊ အမှိုက်နည်းခြင်း။
3. Active unwinding ကို AC vector motor ဖြင့် ထိန်းချုပ်ထားပြီး အနည်းငယ်တင်းမာမှု ထိန်းချုပ်မှုကို ပြီးမြောက်ပြီး နိမ့်သော သို့မဟုတ် အရှိန်မြင့်သည့်အချိန်တိုင်းတွင် အဆက်မပြတ်ထွက်ရှိစေပါသည်။
4. ပွတ်တိုက်မှုနည်းသော လေဆလင်ဒါတင်းမာမှု detector၊ တင်းမာမှုကို မြန်ဆန်တိကျစွာ ချိန်ညှိနိုင်သည်။
5. Rotary turret သည် အလိုအလျောက် လှည့်နိုင်ပြီး ရှာဖွေနိုင်သည်။အရေးပေါ်အခြေအနေတွင် ၎င်း၏စွမ်းဆောင်ရည်ကို ပယ်ဖျက်နိုင်သည်။
6. Cutter သည် ပုံမှန်အလုပ်လုပ်သည့်အနေအထားရှိပြီး စက်ရပ်သည့်မုဒ်တွင် လော့ခ်ချမည်ဖြစ်သည်။
************************************************** ******************
Infeed ယူနစ်
ဖွဲ့စည်းပုံ
1. သံမဏိ roller မှပြောင်းလွယ်ပြင်လွယ် roller
2. သံမဏိ roller သည် လွတ်လပ်သောမော်တာဖြင့် မောင်းနှင်သည့် ပါဝါဖြစ်သည်။
3. AC2.2KW- သံမဏိ roller ၏စွမ်းအားသည် YASKAWA AC 2.2kw vector controller မှဖြစ်သည်
4. Flexible roller up/down နှင့် pressure adjustment ကို pneumatic အစိတ်အပိုင်းများဖြင့် အပြီးသတ်ပါသည်။
5. မြင့်မားသောအထိခိုက်မခံသောအနီးကပ်တင်းမာမှုထိန်းချုပ်မှု
6. Tension DANCER roller သည် close-loop tension control တွင်ပါဝင်ပါသည်။
သတ်မှတ်ချက်
1. သံမဏိကြိတ်စက် ¢125㎜
2. ပြောင်းလွယ်ပြင်လွယ် ကြိတ်စက်¢100㎜
3. Chemigum shore (A)65~70°
4. Tension set 3~30kg
5. တင်းမာမှုတိကျမှု ±0.3kg
6. မော်တာ AC2.2KW+ENCONDER+FAN (AC2.2kw vector controller၊ YASKAWA ပါသော)
7. Max.ပြောင်းလွယ်ပြင်လွယ်ရှိသော roller ဖိအား 300 ကီလိုဂရမ်
ထူးခြားချက်
1. အပိုင်း-တင်းမာမှုကွဲပြားကြောင်းသေချာစေရန်ပြောင်းလွယ်ပြင်လွယ်ဖြစ်စေရန်သံမဏိ roller
2. Close-loop tension control သည် အဆက်မပြတ် ပုံနှိပ်တင်းအား ထုတ်ပေးလိမ့်မည်။
3. ဗဟိုထိန်းချုပ်ကိရိယာဖြင့် ပြီးမြောက်စေသည့် ပင်မမော်တာနှင့် လိုက်လျောညီထွေရှိသော အတက်/အဆင်း လင့်ခ်များ
4. ပင်မမော်တာနှင့် လွယ်ကူသော လည်ပတ်ချိတ်ဆက်မှုများတွင် တင်းမာမှုထိန်းချုပ်မှု
5. မြင့်မားသောတိကျသောတပ်ဆင်မှုတွင် လွတ်လပ်သောယူနစ်ဘောင်
************************************************** ******************
Pစုတ်ယူနစ်
ဖွဲ့စည်းပုံ
1. မဆိုင်းမတွ ဆလင်ဒါ အံဝင်ခွင်ကျ၊ ပန်းကန်ဆလင်ဒါများ၏ ဘေးတိုက် တပ်ဆင်မှုသည် ၎င်းတို့နှင့် ထပ်တူကျကြောင်း သေချာစေရန်အတွက် ချိန်ညှိနိုင်သည်။
2. Integral impression roller၊ ပြောင်းလဲရန်လွယ်ကူသည်။
3. ထို့နောက် impression roller အတက်/အဆင်း သည် အနိမ့်ဆုံး ဝဘ်ပြောင်းလဲမှုကို အာမခံပေးနိုင်သည့် dancer-arm အမျိုးအစားကို လက်ခံပါသည်။
4. Impression rollers များသည် ဆက်တိုက်ဖိအားပေါ်နေပြီး တစ်ချိန်တည်းတွင် ဖိအားထွက်နေသည်။
5. အဖွင့်အမျိုးအစား၊ အလိုအလျောက်ပြန်မှင်၊ လက်စွဲ မင်ခွက် အတက်/အောက်
6. အဆုတ်ဆရာဝန် အတက်/အောက်၊ လက်ဘီးကြီးဖြင့် သုံးဖက်မြင်ဆရာဝန် ချိန်ညှိခြင်း။
7. Oscillating Doctor နှင့် Oscillating Frequency သည် မော်တာလည်ပတ်ခြင်းနှင့် အချိုးကျစေသည်။
8. အားကောင်းသောဂီယာအုံသည် pneumatic ဖိအားစနစ်နှင့် ပေါင်းစပ်ထားသည်။oil immersion gearbox တွင် seal structure ပါရှိပါသည်။
သတ်မှတ်ချက်
1. ဆလင်ဒါအရှည် 650-1000mm
2. Impression roller¢120 မီလီမီတာ တာယာရီရော်ဘာ (ကမ်းစပ် (A) 75°±2°)
3. Max.Impression 500 ကီလိုဂရမ်
4. ဆရာဝန်ဖိအား 10-150 ကီလိုဂရမ်
အင်္ဂါရပ်များ
1. လျော်ကြေးငွေကို အတိအကျနှင့် လိုက်လျောညီထွေရှိသော အရောင်မှတ်ပုံတင်ခြင်းအတွက် တိကျသောဘောလုံးဝက်အူဖြင့် ထိန်းချုပ်ထားသည်။
2. ၎င်းတွင် အမြန် lifter ပါရှိပြီး၊ ၎င်းတွင် impression roller ကို စက်၏မုဒ်တွင် သော့ခတ်စေနိုင်သည်။
3. ဆလင်ဒါစနစ်အား လေသွင်းခြင်းသည် ညစ်ပတ်သောအစက်မပေါ်စေရန် ရှောင်ရှားနိုင်မည်ဖြစ်သည်။
************************************************** ******************
Drying ယူနစ်
ဖွဲ့စည်းပုံ
1. လမ်းညွှန်ရထားလမ်းတစ်လျှောက် အဆုတ်ရောင်မီးဖို အဖွင့်/အပိတ်
2. အရောင်အတွက် လွတ်လပ်သော အခြောက်ခံစနစ် ဒီဇိုင်း
3. Intelligent အဆက်မပြတ်အပူချိန်ထိန်းချုပ်မှု
4. တံဆိပ်အပူထိန်းသိမ်းမီးဖို၊ အပူအရင်းအမြစ်ကိုဒုတိယအသုံးပြုနိုင်ပါတယ်။
5. ရှည်လျားပြီး ပြန့်ကားသော လေထိုးစက်များ
6. လျှပ်စစ်အပူ
သတ်မှတ်ချက်
1. ပါးပျဉ်းရှိ ဝဘ်အရှည် 1400 မီလီမီတာ (ရှစ်ခုမြောက်အရောင် 1600 မီလီမီတာ)
2. Air nozzles 7 pcs
3. လေအမြန်နှုန်း 7 m/s
4. လေကို 0-50% ပြန်သုံးသည်
5. Temp.ထိန်းချုပ်တိကျမှု ± 2 ℃
6. ယူနစ်တစ်ခုစီအတွက် အပူစွမ်းအင် 18.5 kw
7. Max.မီးဖိုအပူချိန် 80 ℃ (indoor 20 ℃)
8. Max.လေထွက်နှုန်း 2800 m3/h
9. Blower ပါဝါ 1.1 KW/ယူနစ်
အင်္ဂါရပ်များ
1. လေကို ပြန်သုံးပါက စွမ်းအင်ရင်းမြစ်ကို သက်သာစေမည်ဖြစ်သည်။
2. ပိုများသောလေနည်းလမ်းများသည် ဝဘ်လေထုတစ်ခုလုံးကို ဆိုင်ကလုန်း၊ အတွင်းပိုင်းမှ မျက်နှာပြင်အထိ ခြောက်သွေ့စေပြီး ပွက်ဖောင်းမထွက်လာစေပါ။
3. အလိုအလျောက် အဆက်မပြတ် အပူချိန်သည် အရောင်ရင့်တစ်ခုစီအတွက် အကျိုးရှိပါမည်။
4. ကြီးမားသောလေစီးကြောင်းသည် အပူချိန်နိမ့်လေကို အရှိန်မြင့်စေပြီး ခြောက်သွေ့စေပါသည်။
5. အနုတ်လက္ခဏာဖိအားကို မီးဖိုအတွင်းတွင် ဒီဇိုင်းထုတ်ထားပြီး၊ လေပူသည် ပန်းကန်ဆလင်ဒါ၏မျက်နှာပြင်သို့ လွင့်သွားမည်မဟုတ်သည့်အပြင် ဆလင်ဒါသည် အခြောက်ခံမည်မဟုတ်သည့်အပြင် သတ္တုအညစ်အကြေးများပါ၀င်မည်မဟုတ်ပါ။
6. အပူပြွန်ကို အလွယ်တကူ ပြောင်းနိုင်သည်။
7. ဘေးချင်းကပ်အပူပေးစနစ်၊ ပဲ့တင်ထပ်ခြင်းကို ရှောင်ရှားရန်အတွက် ပျော့ပျောင်းသောရေပိုက်သည် စက်အား အပူပေးစနစ်ဖြင့် ချိတ်ဆက်ပေးသည်။
8. အအေးခံပန်ကာ 0.55 kw (ယူနစ်တစ်ခုစီ)
************************************************** ******************
Outfeed ယူနစ်
ဖွဲ့စည်းပုံ
1. သံမဏိဒလိမ့်တုံးမှ ပြောင်းလွယ်ပြင်လွယ်ရှိသော ဒလိမ့်တုံး
2. သံမဏိဒလိမ့်တုံးသည် လွတ်လပ်သောမော်တာဖြင့် မောင်းနှင်သည့် ပါဝါကြိတ်စက်ဖြစ်သည်။
3. YASKAWA vector controller system ကို သီးခြား ဂီယာအစိတ်အပိုင်းများတွင် အသုံးပြုသည်။
4. မြင့်မားသောအထိခိုက်မခံသောအနီးကပ်ကွင်းတင်းမာမှုထိန်းချုပ်မှုစနစ်
5. Tension dance roller သည် close-loop ထိန်းချုပ်မှုနှင့် တုံ့ပြန်မှု အချက်ပြမှုများကို linear potentiometer ဖြင့် ပေးပို့သည်။
သတ်မှတ်ချက်
1. သံမဏိလိပ် ¢125mm
2. ပြောင်းလွယ်ပြင်လွယ် ကြိတ်စက်¢120mm (ဓာတုဗေဒင်ကမ်းစပ် (A)65~70°)
3. Tension set 3~30kg
4. တင်းမာမှုတိကျမှု ±0.3kg
5. မော်တာ AC2.2KW+ENCONDER+FAN (AC2.2kw၊YASKAWA vector controller ဖြင့်)
ထူးခြားချက်
1. တင်းမာမှုအပိုင်း ကွဲပြားကြောင်း သေချာစေရန်အတွက် လိုက်လျောညီထွေရှိသော ကြိတ်စက်မှ သံမဏိဒလိမ့်တုံး
2. Independent close-loop tension control သည် အဆက်မပြတ် print tension ကို ထုတ်ပေးမည်ဖြစ်ပါသည်။
3. ပင်မမော်တာနှင့် လွယ်ကူသော လည်ပတ်ချိတ်ဆက်မှုများတွင် တင်းမာမှုထိန်းချုပ်မှု
4. တိကျသော တပ်ဆင်မှုတွင် လွတ်လပ်သော ယူနစ်ဘောင်
************************************************** ******************
ပြန်လှည့်ယူနစ်
ဖွဲ့စည်းပုံ
1. Built-in dual-position rotary turret
2. နှစ်ထပ်ရှပ်များသည် အမှီအခိုကင်းစွာနှင့်တက်ကြွစွာပြန်ရစ်သည်။
3. YASKAWA vector controller ကို လွတ်လပ်သော ဂီယာစနစ်တွင် အသုံးပြုသည်။
4. Tension detection system နှင့် တည်ငြိမ်တင်းမာမှုအတွက် DANCER စနစ်အစုံ
5. Close-loop တင်းအားထိန်းချုပ်မှု
6. Rotary turret သည် လှည့်နိုင်ပြီး အနေအထားပြောင်းကာ အလိုအလျောက် နေရာချနိုင်သည်။
7. Tension and tension attenuation ကို Human-Machine Interface တွင် တရုတ်ဘာသာဖြင့် လွတ်လပ်စွာ သတ်မှတ်နိုင်သည်။
သတ်မှတ်ချက်
1. Max.စက္ကူအူတိုင် အကျယ် 1050mm
2. Max.Reel ဖြစ်ခဲ့ရတယ်။¢600mm
3. ပြန်ရစ်မော်တာ AC4KW+ENCODER+FAN (YASKAWA 4KW vector controller)
4. တင်းမာမှု လျော့ချခြင်း 0~100% ပြန်လှည့်ခြင်း
5. Rotary turret အမြန်နှုန်း 1 r/min
6. တင်းမာမှုအကွာအဝေး 3 မှ 30 ကီလိုဂရမ်
7. တင်းမာမှုတိကျမှု ±0.3kg
ထူးခြားချက်
1. မြင့်မားသော ထိရောက်မှုနှင့် အချိန်ကုန်သက်သာစွာဖြင့် မရပ်မနား ပြောင်းလဲနေသော ရီရယ်
2. စဉ်ဆက်မပြတ်တင်းမာမှုတွင်၊ ဖြုန်းတီးမှုနည်းပါးသော ရီစင့်ခ်ရိုပြောင်းခြင်း။
3. AC မော်တာသည် ပြန်ရစ်ခြင်းကို ထိန်းချုပ်သည်၊ သုညတင်းမာမှု ထိန်းချုပ်မှုကို ပြီးမြောက်စေကာ အမြန်နှုန်းနိမ့် သို့မဟုတ် အရှိန်မြင့်သည့်အချိန်တိုင်းတွင် အဆက်မပြတ်ထွက်ရှိစေသည်
4. ပွတ်တိုက်မှုနည်းသော လေဆလင်ဒါကို တင်းမာမှု သို့မဟုတ် အရှိန်မြင့်ရန်အတွက် အသုံးပြုသည်။
5. Rotary turret သည် လှည့်၍ အလိုအလျောက် ရှာဖွေနိုင်သည်။
6. Cutter သည် ပုံမှန်အလုပ်လုပ်သည့်အနေအထားရှိပြီး စက်ရပ်သည့်မုဒ်တွင် လော့ခ်ချနိုင်သည်။
7. Tension attenuation function သည် reel ၏ အပြင်ဘက်တွင် ထပ်တူကျပြီး core ပုံပန်းသဏ္ဌာန်မရှိသော တင်းကျပ်မှုဒီဂရီကို အာမခံနိုင်ပါသည်။
************************************************** ******************
Rack And Web Travel
ဖွဲ့စည်းပုံ
1. ဖိအားနည်းသော ခွန်အားမြင့်ဘောင်ကို အလွိုင်းသွန်းသံဖြင့် ပြုလုပ်ထားသည်။
သတ်မှတ်ချက်
1. ဘေးဘောင်အထူ 70 မီလီမီတာ
2. ယူနစ်နှစ်ခုကြားအကွာအဝေး 1-1.4m
3. လမ်းညွှန် rollers¢70 mm ¢80 mm ¢100 mm(အဆင့် 2.5 အထိ ဒိုင်းနမစ်လက်ကျန် နှင့် တည်ငြိမ်လက်ကျန် 2 g အထိ)
4. လမ်းညွှန် roller အရှည် 1050 မီလီမီတာ
5. ချည်အဆင့်လမ်းညွှန် roller ၏ 30 မီလီမီတာ
ထူးခြားချက်
1. စက်တည်ငြိမ်စွာလည်ပတ်ခြင်းကိုအာမခံချက်အတွက်ဘောင်များအားလုံးသည်အတွင်းပိုင်း-ဖိစီးမှုနှစ်ကြိမ်ဖယ်ရှားထားသည်။
2. တိကျသောတည်နေရာအာမခံချက်အတွက် တိကျသောဘောင်များကို တင်သွင်းသောဦးစားပေးဖြင့် လုပ်ဆောင်ပါသည်။
3. ဝဘ်လည်ပတ်ချိန်ခွင်လျှာကိုအာမခံရန် လမ်းညွှန် roller များကို ကောင်းမွန်စွာစီစဉ်ထားပါသည်။
************************************************** ******************
အဓိက ဂီယာယူနစ်
ဖွဲ့စည်းပုံ
1. ပင်မမော်တာသည် ဘုံဝင်ရိုးမှတဆင့် ယူနစ်တစ်ခုစီသို့ ပါဝါပို့လွှတ်သည်။
2. ဂီယာအုံနှင့် အခြားလမ်းဆုံများကို ချိတ်ဆက်ခြင်း ပျော့ပြောင်းမှု
3. ပင်မမော်တာတွင် သီးခြားအောက်ခြေပြားနှင့် လျှော့ချဂီယာပါရှိသည်။
သတ်မှတ်ချက်
1. မော်တာပါဝါ AC11KW+ENCODER+FAN (YASKAWA 11KW vector controller ပါသော)
ထူးခြားချက်
1. Low-speed full-load start up
2. အလိုအလျောက် အရှိန်မြှင့်ခြင်း။
3. ပင်မဂီယာနှင့် အခြားမော်တာများကို လုံး၀ထိန်းချုပ်ထားပြီး စက်တစ်ခုလုံးနှင့် အဆင့်လိုက်လုပ်ဆောင်သည်။
************************************************** ******************
Tension ထိန်းချုပ်မှု
1. ညှိနှိုင်းထိန်းချုပ်မှုတွင် အပိုင်းလေးပိုင်း
2. မြင့်မားသောတိကျသောတင်းမာမှုထိန်းချုပ်မှု၊ အရှိန်အဟုန်/အရှိန်လျော့ခြင်းသည် တင်းမာမှုကိုထိခိုက်စေမည်မဟုတ်ပါ။
************************************************** ******************
အလင်းရောင်စနစ်
အယ်လ်အီးဒီ
************************************************** ******************
ကွန်ပျူတာခြေရာခံစနစ်
မော်ဒယ်- Wuhan အမှတ်တံဆိပ်
************************************************** ******************
လေပြွန်စနစ်
ယူနစ်တစ်ခုစီနှင့် နယူနစ်အစိတ်အပိုင်းများ၏ ဗဟိုချုပ်ကိုင်မှုအမှတ်တွင် တပ်ဆင်ထားသော ရေဖယ်ကိရိယာများနှင့် စစ်ထုတ်ကိရိယာများ
************************************************** ******************
Anti-static စနစ်
Static Brush
************************************************** ******************
စက်တွဲများ
ကိရိယာအစုံ ၁ စုံ
ဝဘ်စစ်ဆေးခြင်း ဗီဒီယိုစနစ် (ဝူဟန်) ၁ ခု
************************************************** ******************
စက်၏အဓိကအစိတ်အပိုင်းများအမှတ်တံဆိပ်
1. Tension control system Japan
2. PLC Panasonic၊ ဂျပန်
3. လေပြေမော်တာ AC4KW+ENCODER+FAN (ABB) (YASKAWA 4KW vector controller ပါသော)
4. ပင်မမော်တာ AC11KW+ENCODER+FAN(ABB) (YASKAWA 11KW vector controller ပါသော)
5. ပြန်ရစ်မော်တာ AC4KW+ENCODER+FAN(ABB) (YASKAWA 4KW vector controller ပါသော)
6. Infeed motor AC2.2KW+ENCODER+FAN (YASKAWA 2.2KW vector controller with)
7. Outfeed motor AC2.2KW+ENCODER+FAN (YASKAWA 2.2KW vector controller with)
8. Human-Machine interface Weilun၊Taiwan
9. ပွတ်တိုက်မှုနည်းသော လေဆလင်ဒါ Fuji Kura၊ ဂျပန်နိုင်ငံ
10. Precision air vent valve CKD
11. အဓိက pneumatic အစိတ်အပိုင်းများ Airtac
12. Main bearings အမေရိကန်
13. Guide roller ¢70mm ¢80mm ¢100mm
14. အနိမ့်ဗို့အားအစိတ်အပိုင်းများ Schneider
************************************************** ******************
ပြီလေ။
စက်သည် အဆင့်မြင့်နည်းပညာသုံး ထုတ်ကုန်ဖြစ်ပြီး သင့်အား ပိုမိုကောင်းမွန်သော စက်ကိရိယာများပံ့ပိုးပေးရန် အိမ်တွင်းရှိ ဒီဇိုင်းလိုအပ်ချက်ပေါ်မူတည်၍ အဆင့်မြင့်သော ဘောင်များနှင့် စက်ဖွဲ့စည်းပုံကို ပြောင်းလဲပိုင်ခွင့်ရှိသည်။